
As we all know the fall detection system is very handy for older people in day to day life. Because it can notify the person or family member when it detects a fall and reduces the risk of delay in medical attention. So, it leads to the development of different types of automatic fall detection systems. Nowadays, we can find fall detectors even in smartwatches, fitness trackers, and other types of wearables. IoT-based fall detector devices can save a life in an emergency. So in today’s tutorial, we are going to build IoT based fall detection device using NodeMCU and MPU6050 sensor module.
The MPU6050 sensor module has built-in a gyroscope and an accelerometer sensor. The gyroscope is used to determine the orientation and the accelerometer provides information about the angular parameter such as the X, Y, and Z-axis data. For detecting fall, we will compare the acceleration magnitude with the threshold value. If the fall is detected, the device will send an SMS to the concerned person. NodeMCU ESP8266 is used here as a microcontroller and Wi-Fi module to connect with IFTTT to send SMS.
Components Required
Following are the components required for making IoT based Fall Detection System.
| S.N | Components | Description | Quantity | |
|---|---|---|---|---|
| 1. | NodeMCU | ESP8266 12E Board | 1 | https://amzn.to/3mTuL95 |
| 2. | MPU6050 6-axis Gyroscope/Accelerometer | Gyroscope + Accelerometer | 1 | https://amzn.to/39OEuKk |
| 3. | Breadboard | Solderless Breadboard MIni | 1 | https://amzn.to/3n33uRT |
| 4. | Jumper Wires | Connecting Wires | 4 | https://amzn.to/2JWSR44 |
- NodeMCU ESP8266 WiFi development board
- MPU6050 Accelerometer and Gyroscope sensor
- Jumper Wires
Circuit Diagram
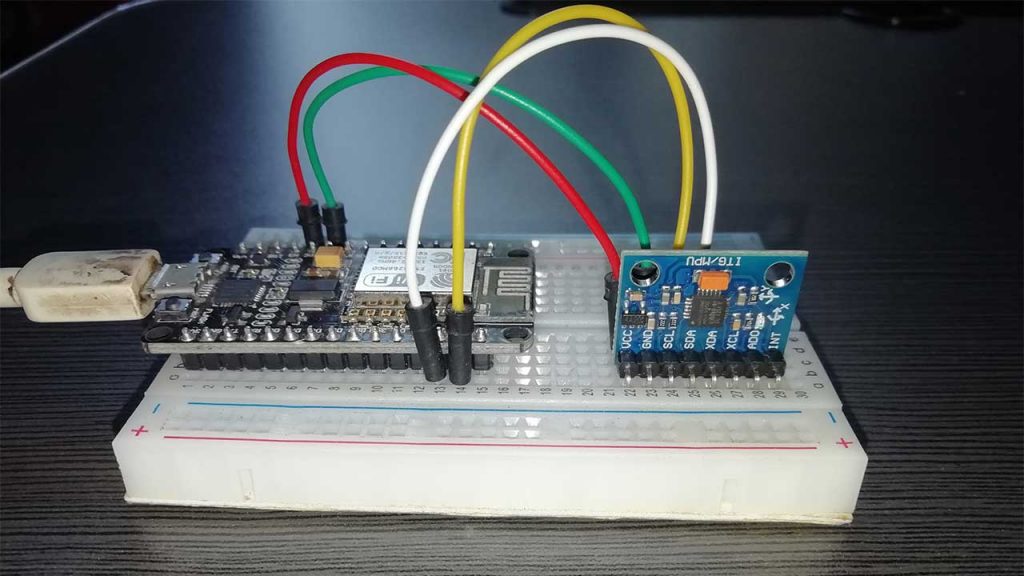
The Circuit Diagram for IoT based Fall Detector using NodeMCU and MPU650 is provided below.
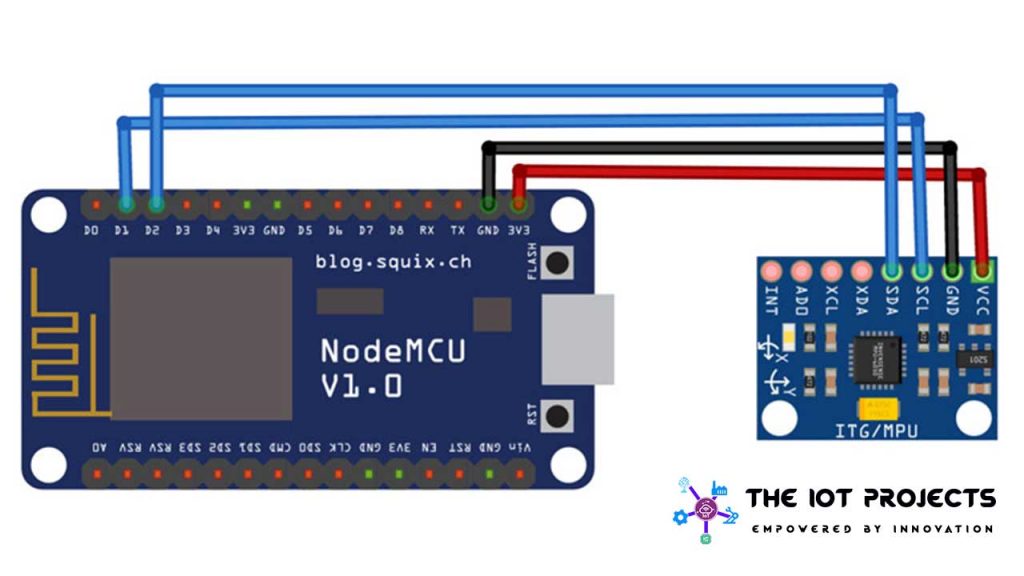
The MPU6050 works on the I2C protocol, so we only need two wires to interface NodeMCU and MPU6050. The SCL and SDA pins of MPU6050 are connected to D1 and D2 pins of NodeMCU, while VCC and GND pins of MPU6050 are connected to 3.3V and GND of NodeMCU.
MPU6050 Sensor Module
The MPU6050 sensor module is a complete 6-axis (3-axis Accelerometer and 3-axis Gyroscope) Module. it is Micro-Electro-Mechanical Systems (MEMS) that is used to measure acceleration, velocity, orientation, displacement, and many other motion-related parameters. Apart from this, it also has an additional built-in Temperature sensor.
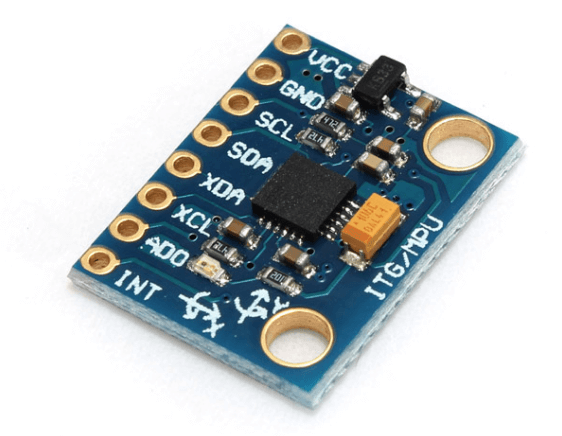
The MPU6050 module is small in size with lower power consumption. Apart from this, it has high repetition, high shock tolerance, and low user price points. Basically, the MPU6050 comes with an I2C and Auxiliary I2C interface. So it can easily interfere with other sensors such as magnetometers and microcontrollers.
IFTTT Setup for IoT Fall Detector
IFTTT (If This Then That) is a web-based service by which we can create chains of conditional statements, called applets. Using these applets, we can send Emails, posts to Twitter, posts to Facebook, play music, SMS, notifications, etc. Here in this project, we are using IFTTT to send SMS notifications to the mobile phone when the system detects a fall.
To use the IFTTT, sign in to your IFTTT account if you already have one or create an account.
Now search for ‘Webhooks’ and click on the Webhooks in Services section.
To make the article to read easy, I have given the steps in the points form below:
- Now, click on the documentation to get the key which will be used in our programming part
- After that click on create
- then click on “this”
- Next, search for webhooks and select it
- After clicking the webhooks, now you want to select “Recieve a web request” and give an event name as per your wish. In my case, I have given fall_detect
- Then click on “that”
- Search for Android SMS
- Now, you want to enter your phone number with country code
- then click on create action
- if you want to play any song when the magnitude exceeds the thresh hold value, you can set any song to play by repeating these all step from the creating part but instead of clicking Android SMS, you want to select Android Service, then you want to select play a specific song to play any song as per your wish.
- After that click on Create Action.
Note: when you finish all the cloud connection parts, next you want to move into programming criteria to ensure your webhook key, ssid, and password. when you finish all these parts make sure to select the correct COM port and board for uploading the code.
Program Code Explanation
The complete code for IoT based Fall Detection using NodeMCU and MPU6050 Sensor is given at the end of this code explanation. Here we are explaining some important parts.
As usual, we have started the code by including all the required libraries. The Wire.h library allows you to communicate with I2C devices while ESP8266.h library provides ESP8266 a specific Wi-Fi routine that we are calling to connect to the network.
#include <Wire.h>
#include <ESP8266WiFi.h>In this step, we have provided Wi-Fi SSID, Password, and IFTTT account credentials.
const char *ssid =
"Alsan"; // Enter your Wi-Fi Name
const char *pass = "01234567890"; // Enter your Wi-Fi Password
void send_event(const char *event);
const char *host = "maker.ifttt.com";
const char *privateKey = "xxx-xxx-xxx-xxx-xxx-xxx-xxx";Inside the void setup(), we have initialized the serial monitor at the baud rate of 115200. The wire library and the data transmission through the power management register are also initialized.
Serial.begin(115200);
pinMode(buzzer, OUTPUT);
Wire.begin();
Wire.beginTransmission(MPU_addr);
Wire.write(0x6B);
Wire.write(0);Now inside the void loop(), we read the MPU6050 sensor data. 2050, 77, 1947 are values for calibration of an accelerometer. The value is the same for the gyroscope, add the calibration values in the original values.
ax = (AcX-2050)/16384.00;
ay = (AcY-77)/16384.00;
az = (AcZ-1947)/16384.00;
gx = (GyX+270)/131.07;
gy = (GyY-351)/131.07;
gz = (GyZ+136)/131.07;After getting the accelerometer and gyroscope values, calculate the amplitude vector of the accelerometer values.
float Raw_Amp = pow(pow(ax,2)+pow(ay,2)+pow(az,2),0.5);
int Amp = Raw_Amp * 10; // Mulitiplied by 10 bcz values are between 0 to 1
Serial.println(Amp);This program first checks if the accelerometer values exceed the lower threshold, if yes, then it waits for 0.5 seconds and checks for the higher threshold. If the accelerometer values exceed the higher threshold, then it checks for the gyroscope values to calculate the change in orientation. Now, If there is a sudden change in orientation, then it waits for 10 seconds and checks if the orientation remains the same. If yes, then it activates the Fall Detector alarm.
if (Amp<=2 && trigger2==false)
{ //if amplitude breaks lower threshold (0.4g)
trigger1=true;
Serial.println("TRIGGER 1 ACTIVATED");
}
if (trigger1==true)
{
trigger1count++;
if (Amp>=12)
{ //if AM breaks upper threshold (3g)
trigger2=true;
Serial.println("TRIGGER 2 ACTIVATED");
trigger1=false; trigger1count=0;
}
}
if (trigger2==true)
{
trigger2count++;
angleChange = pow(pow(gx,2)+pow(gy,2)+pow(gz,2),0.5); Serial.println(angleChange);
if (angleChange>=30 && angleChange<=400)
{ //if orientation changes by between 80-100 degrees
trigger3=true; trigger2=false; trigger2count=0;
Serial.println(angleChange);
Serial.println("TRIGGER 3 ACTIVATED");
}
}
if (trigger3==true)
{
trigger3count++;
if (trigger3count>=10)
{
angleChange = pow(pow(gx,2)+pow(gy,2)+pow(gz,2),0.5);
//delay(10);
Serial.println(angleChange);
if ((angleChange>=0) && (angleChange<=10))
{ //if orientation changes remains between 0-10 degrees
fall=true; trigger3=false; trigger3count=0;
Serial.println(angleChange);
}
else
{ //user regained normal orientation
trigger3=false; trigger3count=0;
Serial.println("TRIGGER 3 DEACTIVATED");
}
}
}
if (fall==true)
{ //in event of a fall detection
Serial.println("FALL DETECTED");
send_event("fall_detect");
fall=false;
}Inside the mpu_read loop(), read all the six registers for the X, Y, and Z axes of the Accelerometer and Gyroscope.
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L) AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
GyX=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
GyY=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
GyZ=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)Testing the IoT based Fall Detection using NodeMCU and MPU6050 Sensor
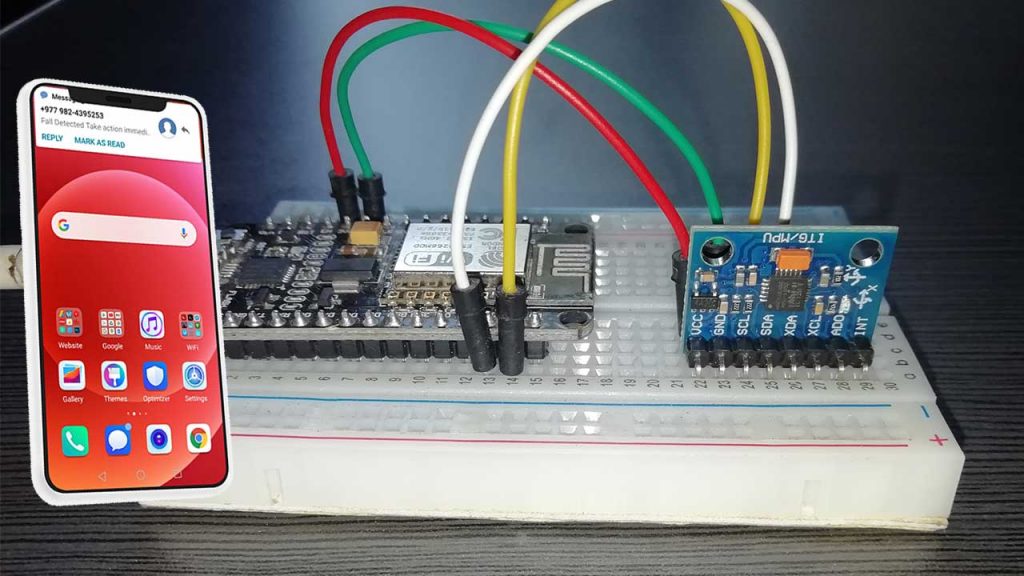
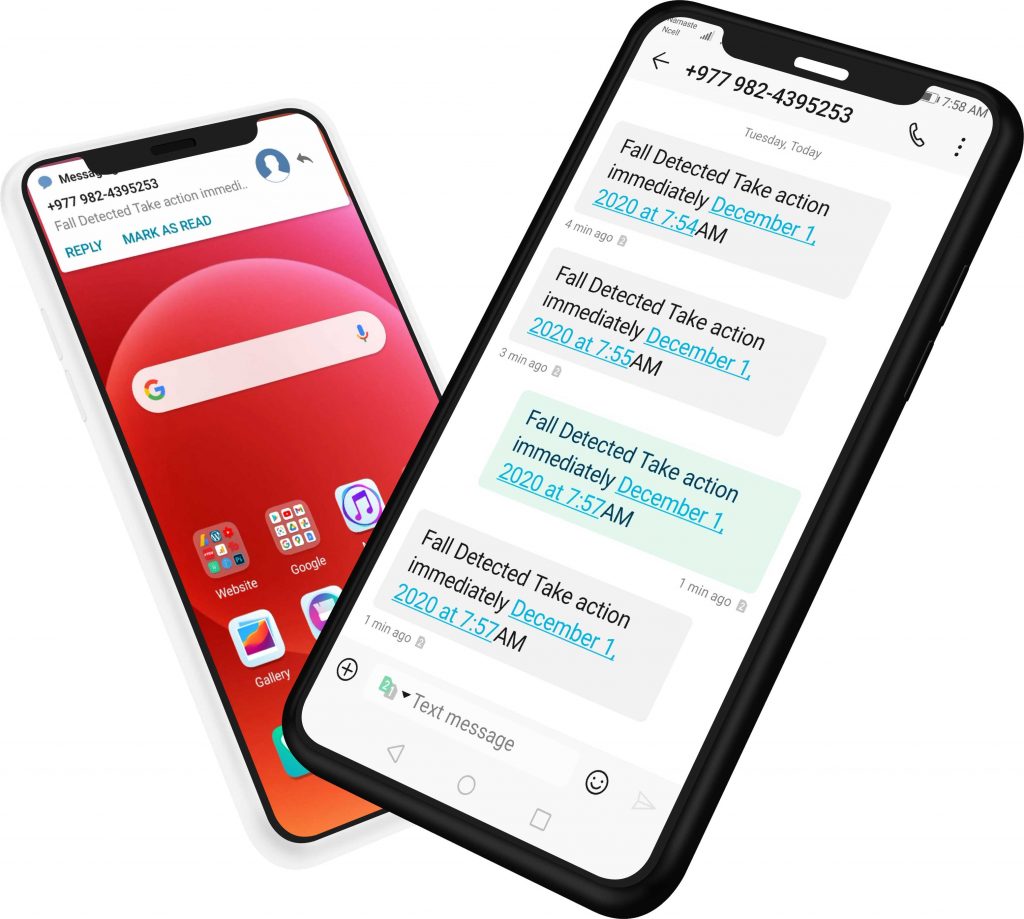
Once your code and hardware are ready, upload the code. To test the project, take the MPU6050 in your hands and pretend to be walking slowly and then suddenly trip on a ledge as shown in the video given below. If the magnitude exceeds the threshold value, the device will activate the fall detection event and send a message to the registered number.
Program Code
This is the final program code for IoT based Fall Detector using NodeMCU.
// IoT based Fall Detection using NodeMCU and MPU6050 Sensor
//https://iotprojectsideas.com
#include <Wire.h>
#include <ESP8266WiFi.h>
const int MPU_addr=0x68; // I2C address of the MPU-6050
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
float ax=0, ay=0, az=0, gx=0, gy=0, gz=0;
boolean fall = false; //stores if a fall has occurred
boolean trigger1=false; //stores if first trigger (lower threshold) has occurred
boolean trigger2=false; //stores if second trigger (upper threshold) has occurred
boolean trigger3=false; //stores if third trigger (orientation change) has occurred
byte trigger1count=0; //stores the counts past since trigger 1 was set true
byte trigger2count=0; //stores the counts past since trigger 2 was set true
byte trigger3count=0; //stores the counts past since trigger 3 was set true
int angleChange=0;
// WiFi network info.
const char *ssid =
"Alsan"; // Enter your Wi-Fi Name
const char *pass = "01234567890"; // Enter your Wi-Fi Password
void send_event(const char *event);
const char *host = "maker.ifttt.com";
const char *privateKey = "xxx-xxx-xxx-xxx-xxx-xxx-xxx";
void setup(){
Serial.begin(115200);
Wire.begin();
Wire.beginTransmission(MPU_addr);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Serial.println("Wrote to IMU");
Serial.println("Connecting to ");
Serial.println(ssid);
WiFi.begin(ssid, pass);
while (WiFi.status() != WL_CONNECTED)
{
delay(500);
Serial.print("."); // print ... till not connected
}
Serial.println("");
Serial.println("WiFi connected");
}
void loop(){
mpu_read();
ax = (AcX-2050)/16384.00;
ay = (AcY-77)/16384.00;
az = (AcZ-1947)/16384.00;
gx = (GyX+270)/131.07;
gy = (GyY-351)/131.07;
gz = (GyZ+136)/131.07;
// calculating Amplitute vactor for 3 axis
float Raw_Amp = pow(pow(ax,2)+pow(ay,2)+pow(az,2),0.5);
int Amp = Raw_Amp * 10; // Mulitiplied by 10 bcz values are between 0 to 1
Serial.println(Amp);
if (Amp<=2 && trigger2==false){ //if AM breaks lower threshold (0.4g)
trigger1=true;
Serial.println("TRIGGER 1 ACTIVATED");
}
if (trigger1==true){
trigger1count++;
if (Amp>=12){ //if AM breaks upper threshold (3g)
trigger2=true;
Serial.println("TRIGGER 2 ACTIVATED");
trigger1=false; trigger1count=0;
}
}
if (trigger2==true){
trigger2count++;
angleChange = pow(pow(gx,2)+pow(gy,2)+pow(gz,2),0.5); Serial.println(angleChange);
if (angleChange>=30 && angleChange<=400){ //if orientation changes by between 80-100 degrees
trigger3=true; trigger2=false; trigger2count=0;
Serial.println(angleChange);
Serial.println("TRIGGER 3 ACTIVATED");
}
}
if (trigger3==true){
trigger3count++;
if (trigger3count>=10){
angleChange = pow(pow(gx,2)+pow(gy,2)+pow(gz,2),0.5);
//delay(10);
Serial.println(angleChange);
if ((angleChange>=0) && (angleChange<=10)){ //if orientation changes remains between 0-10 degrees
fall=true; trigger3=false; trigger3count=0;
Serial.println(angleChange);
}
else{ //user regained normal orientation
trigger3=false; trigger3count=0;
Serial.println("TRIGGER 3 DEACTIVATED");
}
}
}
if (fall==true){ //in event of a fall detection
Serial.println("FALL DETECTED");
send_event("fall_detect");
fall=false;
}
if (trigger2count>=6){ //allow 0.5s for orientation change
trigger2=false; trigger2count=0;
Serial.println("TRIGGER 2 DECACTIVATED");
}
if (trigger1count>=6){ //allow 0.5s for AM to break upper threshold
trigger1=false; trigger1count=0;
Serial.println("TRIGGER 1 DECACTIVATED");
}
delay(100);
}
void mpu_read(){
Wire.beginTransmission(MPU_addr);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU_addr,14,true); // request a total of 14 registers
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
Tmp=Wire.read()<<8|Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
GyX=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
GyY=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
GyZ=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
}
void send_event(const char *event)
{
Serial.print("Connecting to ");
Serial.println(host);
// Use WiFiClient class to create TCP connections
WiFiClient client;
const int httpPort = 80;
if (!client.connect(host, httpPort)) {
Serial.println("Connection failed");
return;
}
// We now create a URI for the request
String url = "/trigger/";
url += event;
url += "/with/key/";
url += privateKey;
Serial.print("Requesting URL: ");
Serial.println(url);
// This will send the request to the server
client.print(String("GET ") + url + " HTTP/1.1rn" +
"Host: " + host + "rn" +
"Connection: closernrn");
while(client.connected())
{
if(client.available())
{
String line = client.readStringUntil('r');
Serial.print(line);
} else {
// No data yet, wait a bit
delay(50);
};
}
Serial.println();
Serial.println("closing connection");
client.stop();
}Video Demonstration
Conclusion
So, that’s pretty much for this tutorial. I hope you enjoyed making your own IoT based fall detector device using NodeMCU and MPU6050 Module. If you did, don’t forget to share this article with your friends. Want help? let me know in the comment section below.
Recommended Readings:



How to set upper threshold 3g
How you setup the lower threshold 0.4 g ?
Which protocol is used
How will you set up the threshold values
Which protocol is used
I’m not getting a text. what should i do. i followed your instructions
Check permission for IFTTT app from settings
sir still not receiving any text. maybe because of my location? i’m from philippines
People of Some other countries are also facing same issue. The trigger is on serial monitor but sms is not received. So to overcome this issue i have made another project which sends notification through Blynk IoT
Here is the tutorial: http://iotprojectsideas.com/iot-fall-detector-using-mpu6050-esp8266/
Hi
In line 21 22 what should we put instead of maker.ifttt.com and xxxx-xxxx…..
Put your private key provided by ifttt.com
alsan please answer me!!!!
i need your help
Put your authentication token. Check description first
hi sir hope u can help. i keep getting this error message. im not sure how to fix it. i read somewhere they say to change const int MPU_addr to const uint8_t but it still does it work. please help me if you can
error msg:
In file included from C:\Users\raisah\Documents\Arduino\sketch_dec20a\sketch_dec20a.ino:5:0:
C:\Users\raisah\AppData\Local\Arduino15\packages\esp8266\hardware\esp8266\2.7.4\libraries\Wire/Wire.h: In function ‘void mpu_read()’:
C:\Users\raisah\AppData\Local\Arduino15\packages\esp8266\hardware\esp8266\2.7.4\libraries\Wire/Wire.h:71:13: note: candidate 1: uint8_t TwoWire::requestFrom(int, int, int)
uint8_t requestFrom(int, int, int);
^
C:\Users\raisah\AppData\Local\Arduino15\packages\esp8266\hardware\esp8266\2.7.4\libraries\Wire/Wire.h:65:12: note: candidate 2: size_t TwoWire::requestFrom(uint8_t, size_t, bool)
size_t requestFrom(uint8_t address, size_t size, bool sendStop);
^
C:\Users\raisah\AppData\Local\Arduino15\packages\esp8266\hardware\esp8266\2.7.4\libraries\Wire/Wire.h:71:13: note: candidate 1: uint8_t TwoWire::requestFrom(int, int, int)
uint8_t requestFrom(int, int, int);
^
C:\Users\raisah\AppData\Local\Arduino15\packages\esp8266\hardware\esp8266\2.7.4\libraries\Wire/Wire.h:65:12: note: candidate 2: size_t TwoWire::requestFrom(uint8_t, size_t, bool)
size_t requestFrom(uint8_t address, size_t size, bool sendStop);
^
hi sorry if this is a repost. i keep getting this error when verifying. hope you can help me thank you sir
error msg:
In file included from C:\Users\raisah\Documents\Arduino\sketch_dec20a\sketch_dec20a.ino:5:0:
C:\Users\raisah\AppData\Local\Arduino15\packages\esp8266\hardware\esp8266\2.7.4\libraries\Wire/Wire.h: In function ‘void mpu_read()’:
C:\Users\raisah\AppData\Local\Arduino15\packages\esp8266\hardware\esp8266\2.7.4\libraries\Wire/Wire.h:71:13: note: candidate 1: uint8_t TwoWire::requestFrom(int, int, int)
uint8_t requestFrom(int, int, int);
^
C:\Users\raisah\AppData\Local\Arduino15\packages\esp8266\hardware\esp8266\2.7.4\libraries\Wire/Wire.h:65:12: note: candidate 2: size_t TwoWire::requestFrom(uint8_t, size_t, bool)
size_t requestFrom(uint8_t address, size_t size, bool sendStop);
^
C:\Users\raisah\AppData\Local\Arduino15\packages\esp8266\hardware\esp8266\2.7.4\libraries\Wire/Wire.h:71:13: note: candidate 1: uint8_t TwoWire::requestFrom(int, int, int)
uint8_t requestFrom(int, int, int);
^
C:\Users\raisah\AppData\Local\Arduino15\packages\esp8266\hardware\esp8266\2.7.4\libraries\Wire/Wire.h:65:12: note: candidate 2: size_t TwoWire::requestFrom(uint8_t, size_t, bool)
size_t requestFrom(uint8_t address, size_t size, bool sendStop);
^
every thing work fine except when i shake it it go throw infinite loop between
(
TRIGGER 1 ACTIVATED
1
TRIGGER 1 ACTIVATED
TRIGGER 1 DECACTIVATED
1
TRIGGER 1 ACTIVATED
1
TRIGGER 1 ACTIVATED
1
TRIGGER 1 ACTIVATED
1
TRIGGER 1 ACTIVATED
1
TRIGGER 1 ACTIVATED
1
TRIGGER 1 ACTIVATED
TRIGGER 1 DECACTIVATED
1
TRIGGER 1 ACTIVATED
)
ETC………………………………….
how to fix it
Hi Alsan.It is with great interest that I viewed your IoT experiments on Youtube and on your site.I am particulary interest on your IoT fall detection using nodeMCU and MPU-6050.I built the circuit ,dowloaded the codes and started the execution of the program.Every thing worked ok except that I didn’t get the sms to work on my Android cellphone.Living in Quebec Canada, my area code is +1 then my phone #.On the info I found concerning IFTTT and WEBHOOK, being outside the United States,my phone number should start by 00 then my area code and my phone numbers.On the ACTION ,I typed :00+14505404015 this is my phone #,but I didn’t receive any SMS after the Fall being detected.Help me please.